| ROS 1 |
ROS 2 |
| дљњзФ® TCPROS пЉИ TCP/IP зЪДиЗ™еЃЪдєЙзЙИжЬђпЉЙйАЪдњ°еНПиЃЃ |
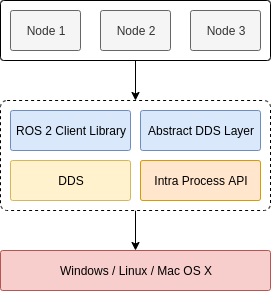
дљњзФ® DDS пЉИжХ∞жНЃеИЖеПСз≥їзїЯпЉЙињЫи°МйАЪдњ° |
| дљњзФ® ROS Master ињЫи°МйЫЖдЄ≠еЉПеПСзО∞еТМж≥®еЖМгАВе¶ВжЮЬдЄїиКВзВєеПСзФЯжХЕйЪЬпЉМеЃМжХізЪДйАЪдњ°зЃ°йБУеЃєжШУеПСзФЯжХЕйЪЬ |
дљњзФ® DDS еИЖеЄГеЉПеПСзО∞жЬЇеИґгАВ ROS 2 жПРдЊЫдЇЖдЄАдЄ™иЗ™еЃЪдєЙ API жЭ•иОЈеПЦжЬЙеЕ≥иКВзВєеТМдЄїйҐШзЪДжЙАжЬЙдњ°жБѓ |
| ROS еП™иГљеЬ® Ubuntu OS дЄКињРи°М |
ROS 2 дЄО Ubuntu гАБ Windows 10 еТМ OS X еЕЉеЃє |
| дљњзФ® C++ 03 еТМ Python2 |
дљњзФ® C++ 11 пЉИеПѓиГљеПѓеНЗзЇІпЉЙеТМ Python3 |
| ROS дїЕдљњзФ® CMake жЮДеїЇз≥їзїЯ |
ROS 2 жПРдЊЫдЇЖдљњзФ®еЕґдїЦжЮДеїЇз≥їзїЯзЪДйАЙй°є |
| жШѓеР¶еЕЈжЬЙдљњзФ®еНХдЄ™ CMakeLists и∞ГзФ®зЪДе§ЪдЄ™еМЕзЪДзїДеРИзФЯжИР .txt |
жФѓжМБеМЕзЪДзЛђзЂЛжЮДеїЇпЉМдї•жЫіе•љеЬ∞е§ДзРЖеМЕйЧідЊЭиµЦеЕ≥з≥ї |
| жґИжБѓжЦЗдїґдЄ≠зЪДжХ∞жНЃз±їеЮЛдЄНжФѓжМБйїШиЃ§еАЉ |
жґИжБѓжЦЗдїґдЄ≠зЪДжХ∞жНЃз±їеЮЛзО∞еЬ®еПѓдї•еЬ®еИЭеІЛеМЦжЧґеЕЈжЬЙйїШиЃ§еАЉ |
| roslaunch жЦЗдїґжШѓзФ® XML зЉЦеЖЩзЪДпЉМдљЖеКЯиГљжЬЙйЩР |
roslaunch жЦЗдїґжШѓзФ® Python зЉЦеЖЩзЪДпЉМдї•жФѓжМБжЫіеПѓйЕНзљЃеТМжЬЙжЭ°дїґзЪДжЙІи°М |
| еН≥дљњдљњзФ®еЃЮжЧґжУНдљЬз≥їзїЯпЉМдєЯжЧ†ж≥Хз°ЃеЃЪжАІеЬ∞жФѓжМБеЃЮжЧґи°МдЄЇ |
жФѓжМБйАЪињЗ RTPREEMPT з≠Й |