| ROS 1 |
ROS 2 |
| дҪҝз”Ё TCPROS пјҲ TCP/IP зҡ„иҮӘе®ҡд№үзүҲжң¬пјүйҖҡдҝЎеҚҸи®® |
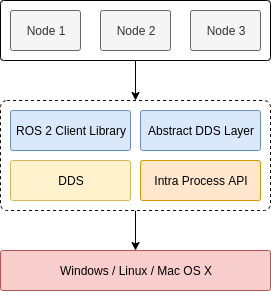
дҪҝз”Ё DDS пјҲж•°жҚ®еҲҶеҸ‘зі»з»ҹпјүиҝӣиЎҢйҖҡдҝЎ |
| дҪҝз”Ё ROS Master иҝӣиЎҢйӣҶдёӯејҸеҸ‘зҺ°е’ҢжіЁеҶҢгҖӮеҰӮжһңдё»иҠӮзӮ№еҸ‘з”ҹж•…йҡңпјҢе®Ңж•ҙзҡ„йҖҡдҝЎз®ЎйҒ“е®№жҳ“еҸ‘з”ҹж•…йҡң |
дҪҝз”Ё DDS еҲҶеёғејҸеҸ‘зҺ°жңәеҲ¶гҖӮ ROS 2 жҸҗдҫӣдәҶдёҖдёӘиҮӘе®ҡд№ү API жқҘиҺ·еҸ–жңүе…іиҠӮзӮ№е’Ңдё»йўҳзҡ„жүҖжңүдҝЎжҒҜ |
| ROS еҸӘиғҪеңЁ Ubuntu OS дёҠиҝҗиЎҢ |
ROS 2 дёҺ Ubuntu гҖҒ Windows 10 е’Ң OS X е…је®№ |
| дҪҝз”Ё C++ 03 е’Ң Python2 |
дҪҝз”Ё C++ 11 пјҲеҸҜиғҪеҸҜеҚҮзә§пјүе’Ң Python3 |
| ROS д»…дҪҝз”Ё CMake жһ„е»әзі»з»ҹ |
ROS 2 жҸҗдҫӣдәҶдҪҝз”Ёе…¶д»–жһ„е»әзі»з»ҹзҡ„йҖүйЎ№ |
| жҳҜеҗҰе…·жңүдҪҝз”ЁеҚ•дёӘ CMakeLists и°ғз”Ёзҡ„еӨҡдёӘеҢ…зҡ„з»„еҗҲз”ҹжҲҗ .txt |
ж”ҜжҢҒеҢ…зҡ„зӢ¬з«Ӣжһ„е»әпјҢд»ҘжӣҙеҘҪең°еӨ„зҗҶеҢ…й—ҙдҫқиө–е…ізі» |
| ж¶ҲжҒҜж–Ү件дёӯзҡ„ж•°жҚ®зұ»еһӢдёҚж”ҜжҢҒй»ҳи®ӨеҖј |
ж¶ҲжҒҜж–Ү件дёӯзҡ„ж•°жҚ®зұ»еһӢзҺ°еңЁеҸҜд»ҘеңЁеҲқе§ӢеҢ–ж—¶е…·жңүй»ҳи®ӨеҖј |
| roslaunch ж–Ү件жҳҜз”Ё XML зј–еҶҷзҡ„пјҢдҪҶеҠҹиғҪжңүйҷҗ |
roslaunch ж–Ү件жҳҜз”Ё Python зј–еҶҷзҡ„пјҢд»Ҙж”ҜжҢҒжӣҙеҸҜй…ҚзҪ®е’ҢжңүжқЎд»¶зҡ„жү§иЎҢ |
| еҚідҪҝдҪҝз”Ёе®һж—¶ж“ҚдҪңзі»з»ҹпјҢд№ҹж— жі•зЎ®е®ҡжҖ§ең°ж”ҜжҢҒе®һж—¶иЎҢдёә |
ж”ҜжҢҒйҖҡиҝҮ RTPREEMPT зӯү |